


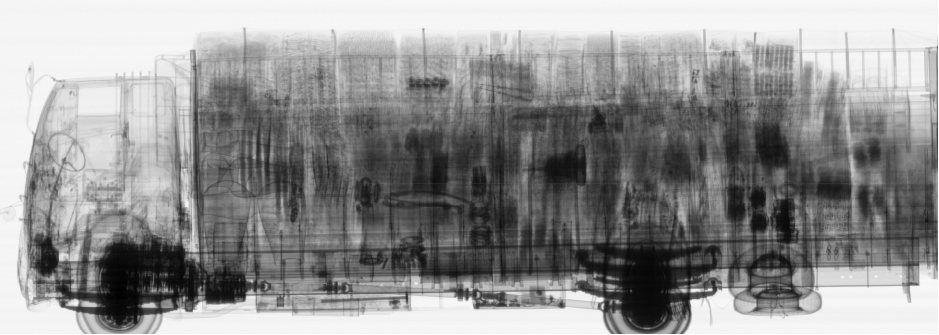
Flytbart last- og køretøjsinspektionssystem
BGV6100 flytbart last- og køretøjsinspektionssystem udstyrer en elektronisk lineær accelerator (Linac) og en ny PCRT solid detektor, som bruger dobbelt-energi røntgen og avancerede materialeidentifikationsalgoritmer til at opnå perspektivscanning og billeddannelse af last og køretøj, identificere smuglergods.Systemet har to arbejdstilstande: drive-through-tilstand og mobil scanningstilstand.I mobil scanningstilstand bevæger systemet sig på jordskinnen for at scanne fragtkøretøjerne.Systemimplementeringen tager højde for bekvemmeligheden ved brug på stedet.En betjeningskonsol er placeret ved indgangen til køretøjet.Front-end guiden er ansvarlig for at starte inspektionsprocessen, efter at køretøjet er klar, og kan observere hele inspektionsprocessen gennem hele processen.Når en abnormitet er fundet, kan inspektionsprocessen stoppes med det samme.Efter at have afsluttet fortolkningen af bilbilledet, kan den bagerste bilbilledfortolker kommunikere med front-end guiden gennem konsollen og kan give fortolkningsresultatet gennem det tilsvarende advarselssignal.
- Større gennemløb, ikke mindre end 120 fragtkøretøjer i timen i drive-through-tilstand og ikke mindre end 25 fragtkøretøjer i timen i mobil scanningstilstand
- Strålingssikkerhed for føreren, har funktionen som automatisk udelukkelse af lastbilkabine og en nøglekontakt til mobil scanningstilstand
- IDE-teknologi, understøtter materialediskrimination
- Rigelig systemintegrationsgrænseflade
- Højere stålgennemtrængningsevne
- Avanceret billedinformationsstyringssystem.Lagring, hentning, visning, eksport og andre funktioner af køretøjsinformation, herunder perspektivbilleder, understøtter netværksforbundne centraliserede styringsfunktioner.
- Klientbetjeningsgrænseflade: Designet af klientbetjeningsgrænsefladen for udstyrssoftwaresystemet er rimeligt og brugervenligt, grænsefladen er klar og kortfattet, betjeningen er praktisk, funktionsmodulets konfiguration er intuitiv, layoutet er rimeligt, og vedligeholdelsen det er nemt.





